
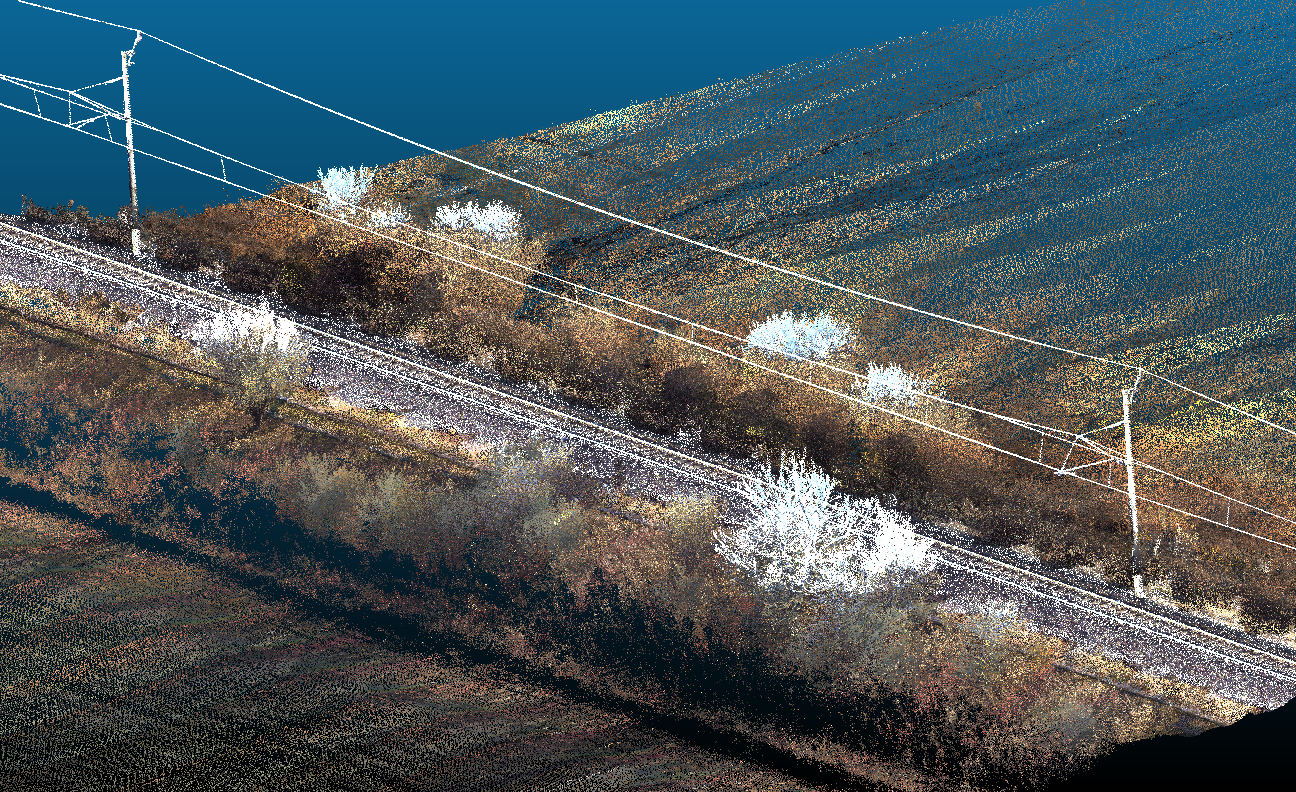
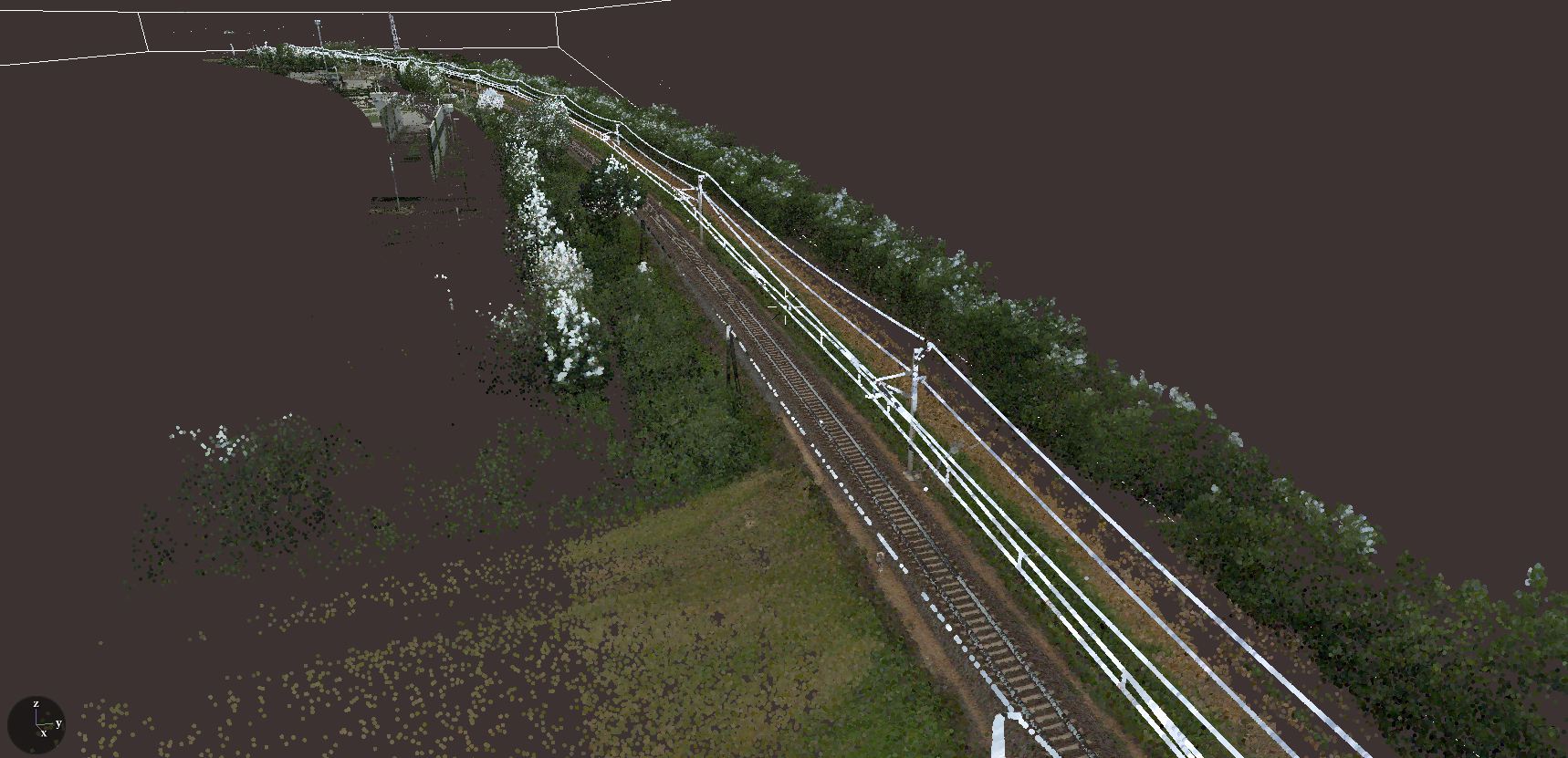
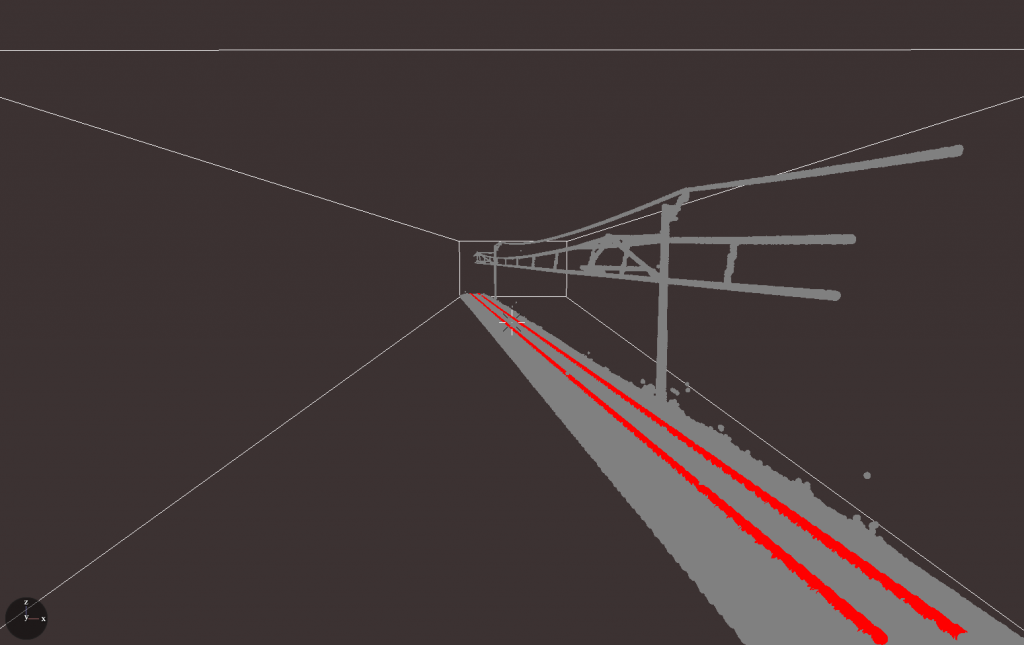
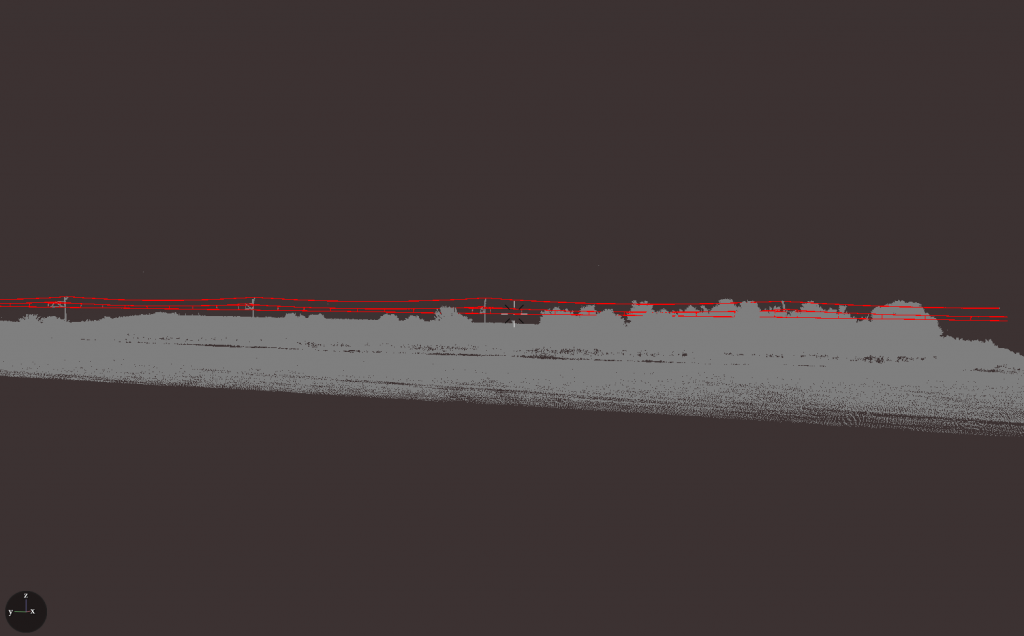
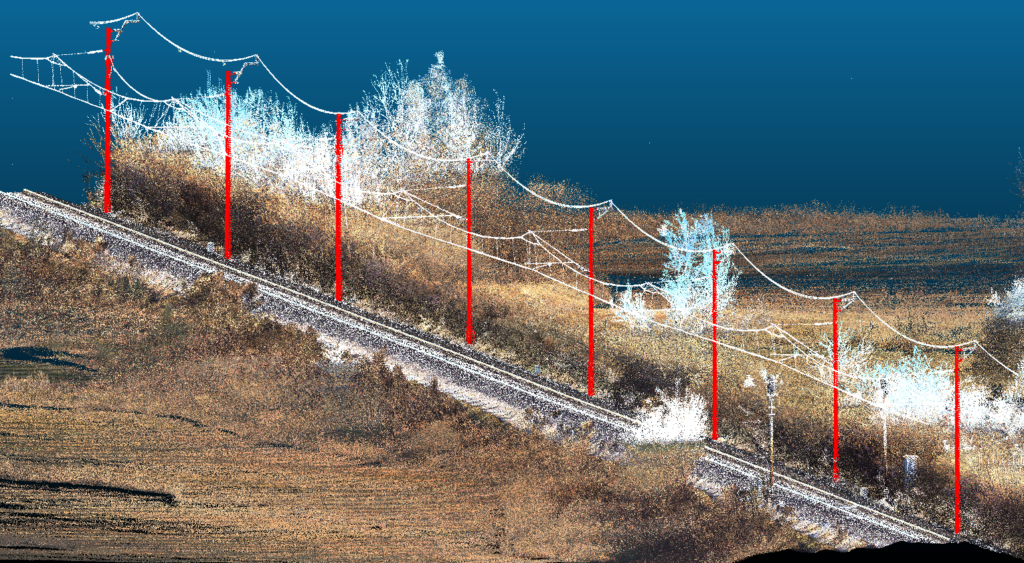
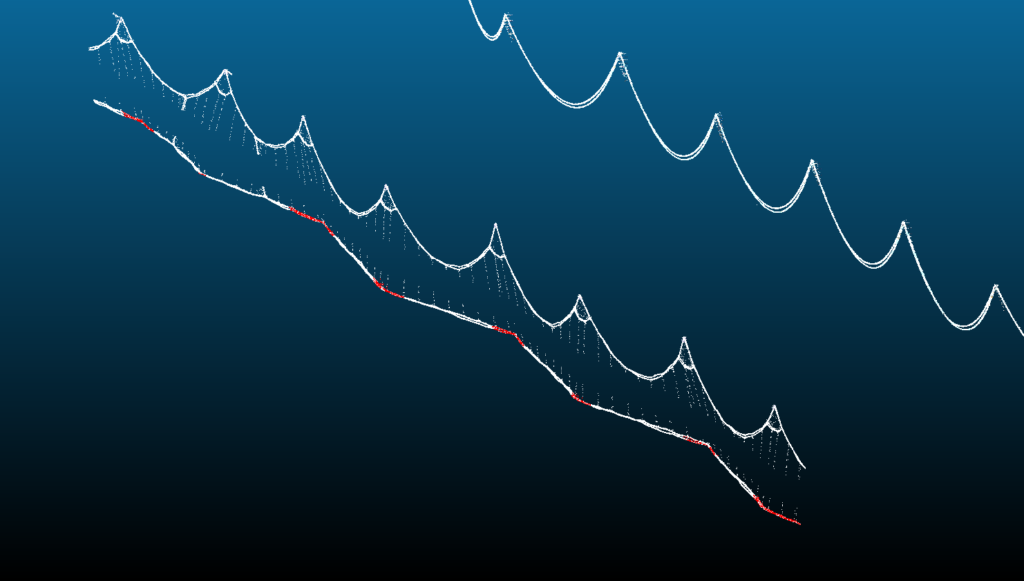
A vasúti infrastruktúra állapotának felügyelete elengedhetetlen a biztonsági előírások megtartása és balesetmegelőzési szempontokból. Az ehhez szükséges rendszeres ellenőrzést még ma is jellemzően költség- és időigényes helyszíni emberes vizsgálatokkal végzik számos országban. A mobil lézerszkenneléssel (MLS – mobile laser scanning) gyűjtött LiDAR pontfelhők alkalmasak lehetnek a vasúti infrastruktúrában vizuális megfigyeléssel is fellelhető anomáliák detektálására, ugyanakkor kihívást jelent a nagy méretű adathalmazok feldolgozásának számításigénye. Kutatásunkban olyan robosztus, automatizálható algoritmusokat valamint egy nyílt forráskódú könyvtárakon alapuló szoftver keretrendszert dolgoztunk ki, amely az előfeltételek minimalizálásával (pl. a vasúti pálya és a felsővezeték pozíciója közötti összefüggések) képes a vasúti infrastruktúra, elsődlegesen a sínpálya és a felsővezetékek objektumdetektálására majd a hozzájuk köthető hibakeresésre.
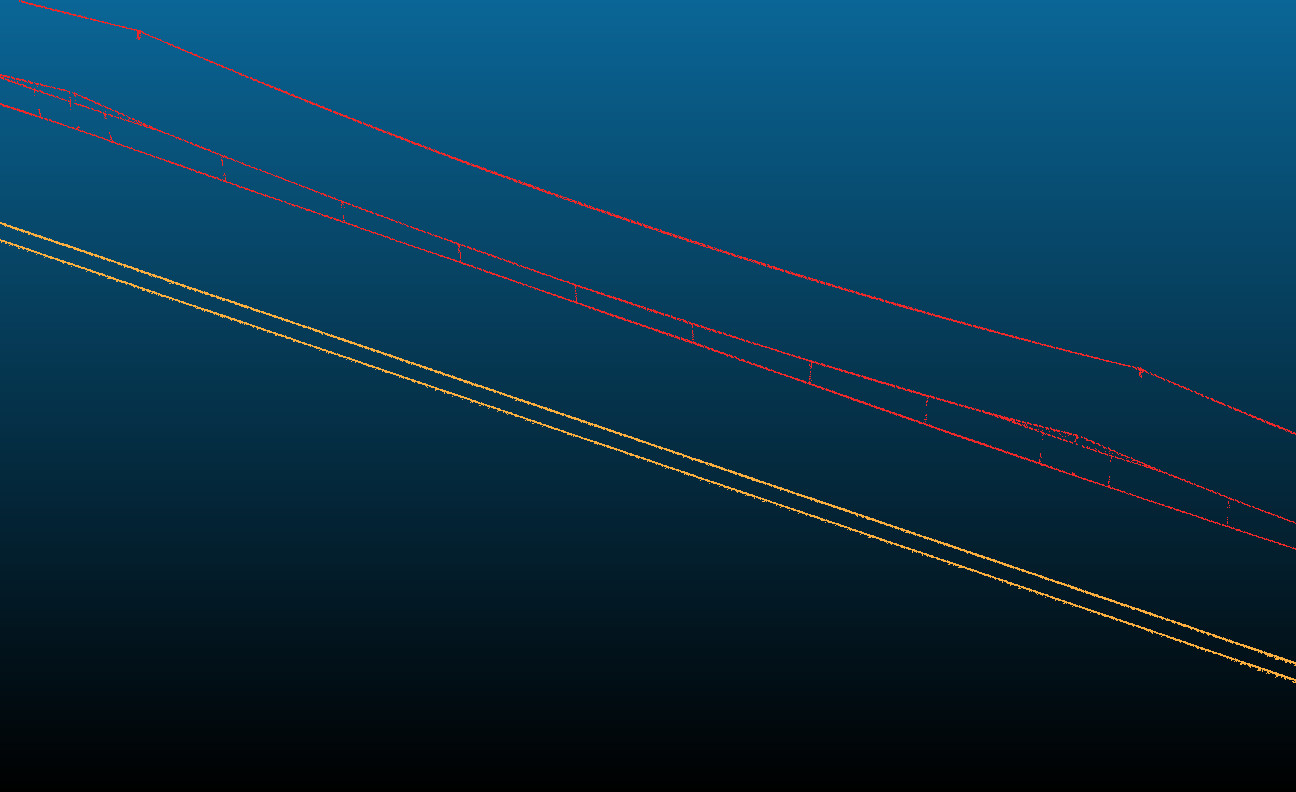
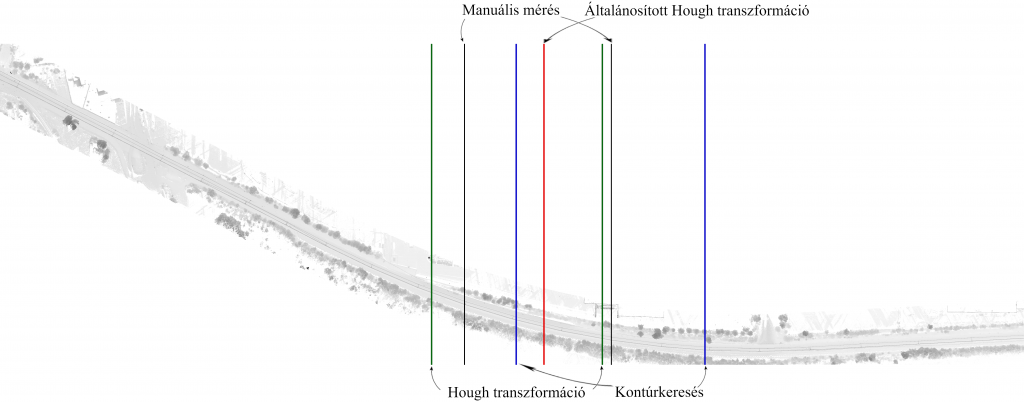
A projektfeladat célja elsődlegesen a vasúti járműre szerelt mobil lézerszkenneléssel készített nagy felbontású pontfelhők feldolgozása az infrastruktúra kulcsfontosságú eleminek (sínágy, sínpálya, felsővezeték, tartóoszlopok, stb.) szegmentálása céljából. Az eredmények alapján elvégezhető a hibaanalízis, például űrszelvény ütközésvizsgálat, felsővezeték kábel belógás vagy a zúzottkő ágyazat felgyűrődésének tekintetében.
Az implementáció C++ nyelven, a Point Cloud Library (PCL) és az OpenCV szoftverkönyvtárak felhasználásával kerül megvalósításra.
A kutatásban algoritmusaink teszteléséhez a Magyar Államvasutak (MÁV) biztosít pontfelhőket, amelyek akár rendkívül nagy sűrűségűek (legalább 5000 pont / m2) és pontosságúak (1-2 cm) is lehetnek.
Forráskód
Publikus projekt (publikált fejlesztések): https://github.com/GISLab-ELTE/railroad
Egyetemi projekt (nem publikált fejlesztések): https://gitlab.inf.elte.hu/gislab/railroad
Publikációk
- Máté Cserép, Adalbert Demján, Friderika Mayer, Balázs Tábori, Péter Hudoba: Effective Railroad Fragmentation And Infrastructure Recognition Based On Dense LiDAR Point Clouds, ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci., V-2-2022, pp. 103–109, 2022. DOI: https://doi.org/10.5194/isprs-annals-V-2-2022-103-2022
- Máté Cserép, Péter Hudoba, Zoltán Vincellér: Robust Railroad Cable Detection in Rural Areas from MLS Point Clouds, Free and Open Source Software for Geospatial (FOSS4G) Conference Proceedings: Vol. 18 , Article 2, 2018.
DOI: https://doi.org/10.7275/z46z-xh51
Dolgozatok
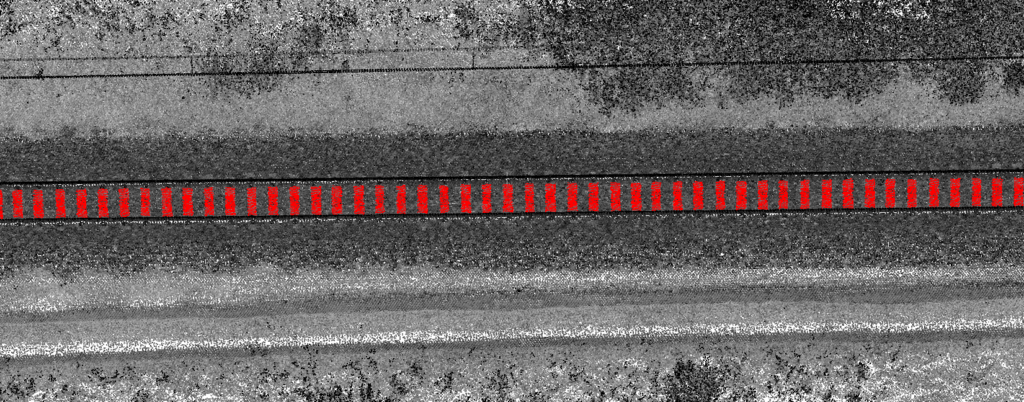
- Dénes Ertl: Automatic rail tie recognition and error detection using LiDAR point clouds, MSc thesis, 2023.
- Attila Láber: Catenary segmentation and error detection in LiDAR point clouds, MSc thesis, 2023.
- Milán Horváth: Vasúti infrastruktúra hibadetektálásának automatizálása LiDAR pontfelhőben, MSc diplomamunka, 2022.
- Balázs Tábori: Vasúti sínpálya LiDAR pontfelhőjének fragmentálása, MSc diplomamunka, 2021.
- Friderika Mayer: Powerline tracking and extraction from dense LiDAR point clouds, MSc thesis, 2020.
- Adalbert Demján: Object extraction of rail track from VLS LiDAR data, MSc thesis, 2020.